Scheduling algoritmi

Definicija problema scheduling-a:
Općenito za definiciju pojma scheduling-a potrebno je specificirati sljedeće
skupove:
- Skup od n procesa J={J1,J2,J3,...,Jn}
- Skup od m procesora P={P1,P2,P3,...,Pm}
- Skup od s tipova resursa R={R1,R2,R3,...,Rs}
Nadalje, precedence ograničenja među procesima mogu biti specificirana pomoću
usmjerenog acikličkog grafa i vremenska ograničenja mogu biti specificirana za
svaki proces. U danom kontekstu "Scheduling" znači dodjelu procesora iz skupa
P i resursa iz skupa R procesima iz skupa J, i to na takav način da se ostvari
završetak svih procesa uz zadovoljenje svih zadanih ograničenja. U svojem općem
obliku ovaj problem je neriješiv.
Scheduling algoritmi se mogu podijeliti u nekoliko klasa:
Preemptive algoritmi
Proces koji se trenutno izvodi može biti prekinut
te se procesor dodjeli nekom drugom procesu, a to se može dogoditi u bilo kojem trenutku i
to prema odluci danog scheduling algoritma.
Non-preemptive algoritmi
Kad je proces jednom pokrenut na procesoru, on se izvršava
do svoje kompletizacije.
Statički algoritmi
Odluke o schedulingu su bazirane na fiksnim parametrima, koji su
pridjeljeni procesima prije njihove aktivacije.
Dinamički algoritmi
Odluke o schedulingu su bazirane na dinamičkim parametrima koji
se mogu mijenjati tijekom rada sistema.
Off-line algoritmi
Ova klasa scheduling algoritama se izvršava na cijelom skupu
procesa prije njihove stvarne aktivacije. Redosljed procesa dobiven ovim algoritmom je spremljen
u tabeli i kasnije se izvršava od strane dispačera.
On-line algoritmi
Odluke dobivene ovim algoritmima se koriste za vrijeme izvršenja
skupa procesa i odluke se donose svaki put kad novi process uđe u sustav.
Optimalni algoritmi
Algoritam je optimalan ako minimizira danu funkciju troška za dani
skup procesa.
Heuristički algoritmi
Algoritam je heuristički ako on teži prema, ali ne garantira
pronalazak optimalnog redoslijeda procesa.
U hard real-time sustavima zahtjeva se potpuno predvidljivo ponašanje, te se ostvarivost danog skupa
procesa mora znati unaprijed. Na ovaj način ako se neki proces ne može izvršiti u zadovoljavajućim
granicama, sistem još uvijek može poduzeti alternativne mjere u pokušaju da izbjegne katastrofične
posljedice. U statičkim sistemima scheduling algoritam se izvodi i testira off-line.
U dinamičkim sistemima algoritam se izvodi on-line. U oba slučaja algoritam mora dati garanciju
održivosti sustava u svim situacijama u kojima se on može naći. Takvi algoritmi nazivaju se
"guarantee-based" algoritmi.
U nekim real-time aplikacijama neki procesi imaju soft constraints-e. Ukoliko se takva ograničenja
ne ispune sustav se neće raspasti ali će mu se degradirati performanse. Tipičan primjer ovakovih
aplikacija su multimedijske aplikacije. U takvim real-time aplikacijama koriste se "best-effort"
scheduling algoritmi. Oni ne garantiraju izvršenje skupa procesa pod zadanim ograničenjima, ali
daju sve od sebe.
U pojedinim aplikacijama koriste se takozvani "imprecise computation" algoritmi.
Ukoliko neki proces za svoje zadovoljavajuće izvršenje zahtijevaju određeni minimalni postotak
svoga proračuna, onda će se upravo taj dio po ovom algoritmu sigurno i ostvariti, a ostatak
proračuna će se obaviti ukoliko to bude moguće.
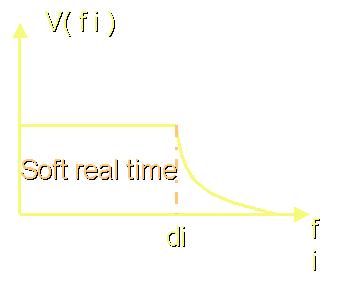
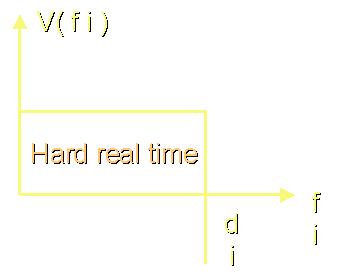
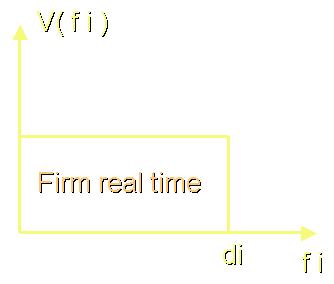
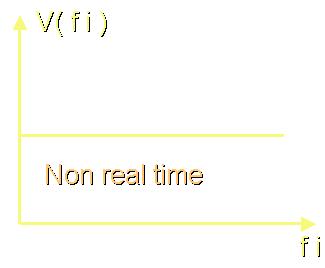
Performanse scheduling algoritama se određuju pomoću funkcije troška( cost function ) definirane
na danom skupu procesa. Primjer je "utility" funkcija koja opisuje vrijednost pridodijeljenu
nekom procesu kao funkciju vremena izvršenja tog procesa. Oblik takvih funkcija za soft, hard i
firm procese prikazan je na slijedećoj slici.


Definicija problema scheduling-a:
Općenito za definiciju pojma scheduling-a potrebno je specificirati sljedeće
skupove:
- Skup od n procesa J={J1,J2,J3,...,Jn}
- Skup od m procesora P={P1,P2,P3,...,Pm}
- Skup od s tipova resursa R={R1,R2,R3,...,Rs}
Nadalje, precedence ograničenja među procesima mogu biti specificirana pomoću
usmjerenog acikličkog grafa i vremenska ograničenja mogu biti specificirana za
svaki proces. U danom kontekstu "Scheduling" znači dodjelu procesora iz skupa
P i resursa iz skupa R procesima iz skupa J, i to na takav način da se ostvari
završetak svih procesa uz zadovoljenje svih zadanih ograničenja. U svojem općem
obliku ovaj problem je neriješiv.
Scheduling algoritmi se mogu podijeliti u nekoliko klasa:
Preemptive algoritmi
Proces koji se trenutno izvodi može biti prekinut
te se procesor dodjeli nekom drugom procesu, a to se može dogoditi u bilo kojem trenutku i
to prema odluci danog scheduling algoritma.
Non-preemptive algoritmi
Kad je proces jednom pokrenut na procesoru, on se izvršava
do svoje kompletizacije.
Statički algoritmi
Odluke o schedulingu su bazirane na fiksnim parametrima, koji su
pridjeljeni procesima prije njihove aktivacije.
Dinamički algoritmi
Odluke o schedulingu su bazirane na dinamičkim parametrima koji
se mogu mijenjati tijekom rada sistema.
Off-line algoritmi
Ova klasa scheduling algoritama se izvršava na cijelom skupu
procesa prije njihove stvarne aktivacije. Redosljed procesa dobiven ovim algoritmom je spremljen
u tabeli i kasnije se izvršava od strane dispačera.
On-line algoritmi
Odluke dobivene ovim algoritmima se koriste za vrijeme izvršenja
skupa procesa i odluke se donose svaki put kad novi process uđe u sustav.
Optimalni algoritmi
Algoritam je optimalan ako minimizira danu funkciju troška za dani
skup procesa.
Heuristički algoritmi
Algoritam je heuristički ako on teži prema, ali ne garantira
pronalazak optimalnog redoslijeda procesa.
U hard real-time sustavima zahtjeva se potpuno predvidljivo ponašanje, te se ostvarivost danog skupa
procesa mora znati unaprijed. Na ovaj način ako se neki proces ne može izvršiti u zadovoljavajućim
granicama, sistem još uvijek može poduzeti alternativne mjere u pokušaju da izbjegne katastrofične
posljedice. U statičkim sistemima scheduling algoritam se izvodi i testira off-line.
U dinamičkim sistemima algoritam se izvodi on-line. U oba slučaja algoritam mora dati garanciju
održivosti sustava u svim situacijama u kojima se on može naći. Takvi algoritmi nazivaju se
"guarantee-based" algoritmi.
U nekim real-time aplikacijama neki procesi imaju soft constraints-e. Ukoliko se takva ograničenja
ne ispune sustav se neće raspasti ali će mu se degradirati performanse. Tipičan primjer ovakovih
aplikacija su multimedijske aplikacije. U takvim real-time aplikacijama koriste se "best-effort"
scheduling algoritmi. Oni ne garantiraju izvršenje skupa procesa pod zadanim ograničenjima, ali
daju sve od sebe.
U pojedinim aplikacijama koriste se takozvani "imprecise computation" algoritmi.
Ukoliko neki proces za svoje zadovoljavajuće izvršenje zahtijevaju određeni minimalni postotak
svoga proračuna, onda će se upravo taj dio po ovom algoritmu sigurno i ostvariti, a ostatak
proračuna će se obaviti ukoliko to bude moguće.
Performanse scheduling algoritama se određuju pomoću funkcije troška( cost function ) definirane
na danom skupu procesa. Primjer je "utility" funkcija koja opisuje vrijednost pridodijeljenu
nekom procesu kao funkciju vremena izvršenja tog procesa. Oblik takvih funkcija za soft, hard i
firm procese prikazan je na slijedećoj slici.
Definicija problema scheduling-a:
Općenito za definiciju pojma scheduling-a potrebno je specificirati sljedeće skupove:
- Skup od n procesa J={J1,J2,J3,...,Jn}
- Skup od m procesora P={P1,P2,P3,...,Pm}
- Skup od s tipova resursa R={R1,R2,R3,...,Rs}
Nadalje, precedence ograničenja među procesima mogu biti specificirana pomoću usmjerenog acikličkog grafa i vremenska ograničenja mogu biti specificirana za svaki proces. U danom kontekstu "Scheduling" znači dodjelu procesora iz skupa P i resursa iz skupa R procesima iz skupa J, i to na takav način da se ostvari završetak svih procesa uz zadovoljenje svih zadanih ograničenja. U svojem općem obliku ovaj problem je neriješiv.
Scheduling algoritmi se mogu podijeliti u nekoliko klasa:
Preemptive algoritmi
Proces koji se trenutno izvodi može biti prekinut te se procesor dodjeli nekom drugom procesu, a to se može dogoditi u bilo kojem trenutku i to prema odluci danog scheduling algoritma.Non-preemptive algoritmi
Kad je proces jednom pokrenut na procesoru, on se izvršava do svoje kompletizacije.Statički algoritmi
Odluke o schedulingu su bazirane na fiksnim parametrima, koji su pridjeljeni procesima prije njihove aktivacije.Dinamički algoritmi
Odluke o schedulingu su bazirane na dinamičkim parametrima koji se mogu mijenjati tijekom rada sistema.Off-line algoritmi
Ova klasa scheduling algoritama se izvršava na cijelom skupu procesa prije njihove stvarne aktivacije. Redosljed procesa dobiven ovim algoritmom je spremljen u tabeli i kasnije se izvršava od strane dispačera.On-line algoritmi
Odluke dobivene ovim algoritmima se koriste za vrijeme izvršenja skupa procesa i odluke se donose svaki put kad novi process uđe u sustav.Optimalni algoritmi
Algoritam je optimalan ako minimizira danu funkciju troška za dani skup procesa.Heuristički algoritmi
Algoritam je heuristički ako on teži prema, ali ne garantira pronalazak optimalnog redoslijeda procesa.
U hard real-time sustavima zahtjeva se potpuno predvidljivo ponašanje, te se ostvarivost danog skupa procesa mora znati unaprijed. Na ovaj način ako se neki proces ne može izvršiti u zadovoljavajućim granicama, sistem još uvijek može poduzeti alternativne mjere u pokušaju da izbjegne katastrofične posljedice. U statičkim sistemima scheduling algoritam se izvodi i testira off-line. U dinamičkim sistemima algoritam se izvodi on-line. U oba slučaja algoritam mora dati garanciju održivosti sustava u svim situacijama u kojima se on može naći. Takvi algoritmi nazivaju se "guarantee-based" algoritmi.
U nekim real-time aplikacijama neki procesi imaju soft constraints-e. Ukoliko se takva ograničenja ne ispune sustav se neće raspasti ali će mu se degradirati performanse. Tipičan primjer ovakovih aplikacija su multimedijske aplikacije. U takvim real-time aplikacijama koriste se "best-effort" scheduling algoritmi. Oni ne garantiraju izvršenje skupa procesa pod zadanim ograničenjima, ali daju sve od sebe.
U pojedinim aplikacijama koriste se takozvani "imprecise computation" algoritmi. Ukoliko neki proces za svoje zadovoljavajuće izvršenje zahtijevaju određeni minimalni postotak svoga proračuna, onda će se upravo taj dio po ovom algoritmu sigurno i ostvariti, a ostatak proračuna će se obaviti ukoliko to bude moguće.
Performanse scheduling algoritama se određuju pomoću funkcije troška( cost function ) definirane na danom skupu procesa. Primjer je "utility" funkcija koja opisuje vrijednost pridodijeljenu nekom procesu kao funkciju vremena izvršenja tog procesa. Oblik takvih funkcija za soft, hard i firm procese prikazan je na slijedećoj slici.